Together with Louis Ellam, Iain Murray, and Mark Girolami, we just published / arXived a new article on dealing with large Gaussian models. This is slightly related to the open problem around the GMRF model in our Russian Roulette paper back a while ago.
We propose a determinant-free approach for simulation-based Bayesian inference in high-dimensional Gaussian models. We introduce auxiliary variables with covariance equal to the inverse covariance of the model. The joint probability of the auxiliary model can be computed without evaluating determinants, which are often hard to compute in high dimensions. We develop a Markov chain Monte Carlo sampling scheme for the auxiliary model that requires no more than the application of inverse-matrix-square-roots and the solution of linear systems. These operations can be performed at large scales with rational approximations. We provide an empirical study on both synthetic and real-world data for sparse Gaussian processes and for large-scale Gaussian Markov random fields.
Article is here. Unfortunately, the journal is not open-access, but the arXiv version is.
We propose Kamiltonian Kernel Hamiltonian Monte Carlo (KMC), a gradient-free adaptive MCMC algorithm based on Hamiltonian Monte Carlo (HMC). On target densities where classical HMC is not an option due to intractable gradients, KMC adaptively learns the target’s gradient structure by fitting an exponential family model in a Reproducing Kernel Hilbert Space. Computational costs are reduced by two novel efficient approximations to this gradient. While being asymptotically exact, KMC mimics HMC in terms of sampling efficiency, and offers substantial mixing improvements over state-of-the-art gradient free samplers. We support our claims with experimental studies on both toy and real-world applications, including Approximate Bayesian Computation and exact-approximate MCMC.
Motivation: HMC with intractable gradients.
Many recent applications of MCMC focus on models where the target density function is intractable. A very simple example is the context of Pseudo-Marginal MCMC (PM-MCMC), for example in Maurizio’spaper on Bayesian Gaussian Processes classification. In such (simple) models the marginal likelihood $p(\mathbf{y}|\theta )$ is unavailable in closed form, but only can be estimated. Performing Metropolis-Hastings style MCMC on $\hat{p}(\theta |\mathbf{y})$ results in a Markov chain that (remarkably) converges to the true posterior. So far so good. But no gradients.
Sometimes, people argue that for simple objects as latent Gaussian models, it is possible to side-step the intractable gradients by running an MCMC chain on the joint space $(\mathbf{f},\theta)$ of latent variables and hyper-parameters, which makes gradients available (and also comes with a set of other problems such as high correlations between $\mathbf{f}$ and $\theta$, etc). While I don’t want to get into this here (we doubt existence of a one-fits-all solution), there is yet another case where gradients are unavailable.
Approximate Bayesian Computation is based on the context where the likelihood itself is a black-box, i.e. it can only be simulated from. Imagine a physicist coming to you with three decades of intuition in the form of some Fortran code, which contains bits implemented by people who are not alive anymore — and he wants to do Bayesian inference on the code-parameters via MCMC… Here we have to give up on getting the exact answer, but rather simulate from a biased posterior. And of course, no gradients, no joint distribution.
Kamiltonian Monte Carlo starts as a Random Walk Metropolis (RWM) and then smoothly transitions into HMC. It explores the target at least as fast as RWM (we proof that), but improves the mixing in areas where it has been before.
We do this by learning the target gradient structure from the MCMC trajectory in an adaptive MCMC framework — using kernels. Every MCMC iteration, we update our gradient estimator with a decaying probability $a_t$ that ensures that we never stop updating, but update less and less, i.e. $$\sum_{t=1}^\infty \frac{1}{a_t}=\infty\qquad\text{and}\qquad\sum_{t=1} ^\infty \frac{1}{a_t^2}=0.$$ Christian Robert challenged our approach: using non-parametric density estimates for MCMC proposals directly is a bad idea: if certain parts of the space are not explored before adaptation effectively stopped, the sampler will almost never move there. For KMC (and for KAMH too) however, this is not a problem: rather than using density estimators as proposal directly, we use them for proposal construction. This way, these algorithms inherit ergodicity properties from random walks. I coded an example-demo here.
Kernel exponential families as gradient surrogates.
The density (gradient) estimator itself is an infinite dimensional exponential family model. More precisely, we model the un-normalised target log-density $\pi$ as an RKHS function $f\in\mathcal{H}$, i.e. $$\text{const}\times\pi(x)\approx\exp\left(\langle f,k(x,\cdot)\rangle_{{\cal H}}-A(f)\right),$$ which in particular implies $\nabla f\approx\nabla\log\pi.$ Surprisingly, and despite a complicated normaliser $A(f)$, such a model can be consistently fitted by directly minimising the expected $L^2$ distance of model and true gradient, $$J(f)=\frac{1}{2}\int\pi(x)\left\Vert \nabla f(x)-\nabla\log \pi (x)\right\Vert _{2}^{2}dx.$$ The magic word here is score-matching. You could ask: “Why not use kernel density estimation?” The answer: “Because it breaks in more than a few dimensions.” In contrast, we are actually able to make the above gradient estimator work in ~100 dimensions on Laptops.
Two approximations.
The über-cool infinite exponential family estimator, like all kernel methods, doesn’t scale nicely in the number $n$ of data used for estimation — and here neither in the in input space dimension $d$. Matrix inversion with costs $\mathcal{O}(t^3d^3)$ becomes a blocker, in particular as $t$ here is the growing number of MCMC iterations. KMC comes in two variants, which correspond to different approximations to the original kernel exponential family model.
KMC lite expresses the log-density in a smaller dimensional (yet growing) sub-space, via collapsing all $d$ input space dimensions into one. It takes the dual form $$f(x)=\sum_{i=1}^{n}\alpha_{i}k(x_{i},x),$$ where the $x_i$ are $n$ random sub-samples (just like KAMH) from the Markov chain history. Downside: KMC lite has to be re-estimated whenever the $x_i$ change. Advantage: The estimator’s tails vanish outside the $x_i$, i.e. $\lim_{\|x\|_{2}\to\infty}\|\nabla f(x)\|_{2}=0$, which translates into a geometric ergodicity result as we will see later.
KMC finite approximates the model as a finite dimensional exponential family in primal form, $$f(x)=\langle\theta,\phi_{x}\rangle_{{\cal H}_{m}}=\theta^{\top}\phi_{x},$$ where $x\in\mathbb{R}^{d}$ is embedded into a finite dimensional feature space $\phi_{x}\in{\cal H}_{m}=\mathbb{R}^{m}.$ While other choices are possible, we use the Randon Kitchen Sink framework: a $m$-dimensional data independent random Fourier basis. Advantage: KMC lite is an efficient on-line estimator that can be updated at constant costs in $t$ — we can fit it on all of the MCMC trajectory. Disadvantage: Its do not decay and our proof for geometric ergodicity of KMC lite does not apply.
Increasing dimensions.
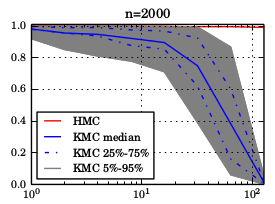
So far, we did not work out how the approximation errors propagate through the kernel exponential family estimator, but we plan to do that at some point. The paper contains an empirical study which shows that the gradients are good enough for HMC up to ~100 dimensions — Under a “Gaussian like smoothness” assumption. The below plots show the acceptance probability along KMC trajectories and quantify how “close” KMC proposals are to HMC proposals.
As a function in number of points $n$ and dimension $d$.
For a fixed number of points $n=2000$, as a function of dimension $d$.
For a fixed dimension $d=16$, as a function of number of points $n$.
How many points are needed to reach an acceptance rate of $0.1,…,0.7$, as a function of dimension $d$?
From RWM to HMC.
Using the well known and (ab)used Banana density as a target, we feed a non-adaptive version of KMC and friends with an increasing number of so-called “oracle” samples (iid from the target), and then quantify how well they mix. While this scenario is totally straw-man, it allows to compare the mixing behaviour of the algorithms after a long burn-in. The below plots show KMC transitioning from a random walk into something close to HMC as the number of “oracle” samples (x-axis) increases.ABC — Reduced simulations and no additional bias.
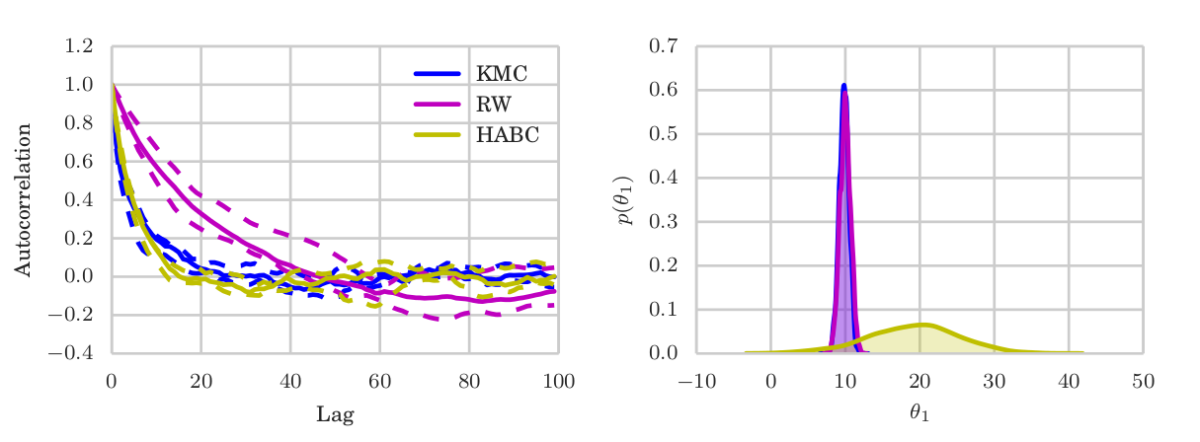
While there is another example in the paper, I want to show the ABC one here, which I find most interesting. Recall in ABC, the likelihood is not available. People often use synthetic likelihoods that are for example Gaussian, which induces an additional bias (in addition to ABC itself) but might improve statistical efficiency. In an algorithm called Hamiltonian ABC, such a synthetic likelihood is combined with stochastic gradient HMC (SG-HMC) via randomized finite differences, called simultaneous perturbation stochastic approximation (SPSA), which works as follows. To evaluate the gradient at a position $\theta$ in sampling space:
Generate a random SPSA mask $\Delta$ (set of binary directions) and compute the perturbed $\theta+\Delta$ and $\theta+\Delta$.
Interpolate linearly between them the perturbations. That is simulate from the ABC likelihood at both points, construct the synthetic likelihood, and use their difference.
The gradient is a (step-size dependent!) approximation to the unknown gradient of the (biased) synthetic likelihood model.
Perform a single stochastic HMC leapfrog step (adding friction as described in the SG-HMC paper)
Iterate for $L$ leapfrog iterations.
What I find slightly irritating is that this algorithm needs to simulate from the ABC likelihood in every leapfrog iteration — and then discards the gained information after a leapfrog step has been taken. How many leapfrog steps are common in HMC? Radford Neal suggests to start with $L\in[100,1000]$. Quite a few ABC simulations come with this! But there are more issues:
SG-HMC mixing. I found that stochastic gradient HMC mixes very poorly when the gradient noise large. Reducing noise costs even more ABC simulations. Wrongly estimated noise (non-stationary !?!) induces bias due to the “always accept” mentality. Step-size decreasing to account for that further hurts mixing.
Bias. The synthetic likelihood can fail spectacularly, if the true likelihood is skewed for example.
KMC does not suffer from either of those problems: It keeps on improving its mixing as it sees more samples, while only requiring a single ABC simulation at each MCMC iterations — rather than HABC’s $2L$ (times noise-reduction-repetitions). It targets the true (modulo ABC bias) posterior, while accumulating information of the target (and its gradients) in the form of the MCMC trajectory.
But how do you choose the kernel parameter?
Often, this question is a threat for any kernel-based algorithm. For example, for the KAMH algorithm, it is completely unclear (to us!) how select these parameters in a principled way. For KMC, however, we can simply use cross-validation on the score matching objective function above. In practice, we use a black box optimisation procedure (for example CMA or Bayesian optimisation) to on-line update the kernel hyper-parameters every few MCMC iterations. See an example where our Python code does this here. Just like the updates to the gradient estimator itself, this can be done with a decaying probability to ensure asymptotic correctness.
This project is yet another method to scale up Bayesian inference via sub-sampling. But unlike most other work on this field, we do not use sub-sampling within an MCMC algorithm to simulate from the posterior distribution of interest. Rather, we use sub-sampling to create a series of easier inference problems, whose results we then combine to get the answer to the question we were originally asking — in an estimation sense, without full posterior simulation. I’ll describe the high-level ideas now.
Updates on the project:
Jun: I was invited to present the work at the Big Bayes workshop in Oxford.
Feb: We got featured in Xi’an’s Og, including a nice discussion in the comments
Feb: I presented the work at the Oxford Machine Learning lunch. Good discussion with the crowd. We will probably change the name to Big Bayes without sub-sampling bias.
Bounded variance (even for growing $N$) and can be controlled.
No sub-sampling bias is introduced. The method inherits the usual finite time bias from MCMC though.
Not limited to certain models or inference schemes.
Trade off redundancy in the data against computational savings.
Perform competitive in practice.
Bayesian inference usually involves integrating a functional $\varphi:\Theta\rightarrow\mathbb{R}$ over a posterior distribution $$\phi=\int d\theta\varphi(\theta)\underbrace{p(\theta|{\cal D})}_{\text{posterior}},$$ where $$p(\theta|{\cal D})\propto\underbrace{p({\cal D}|\theta)}_{\text{likelihood data}}\underbrace{p(\theta)}_{\text{prior}}.$$ For example, to compute the predictive posterior mean for a linear regression model. This is often done by constructing an MCMC algorithm to simulate $m$ approximately iid samples from approximately $\theta^{(j)}\sim p(\theta|{\cal D})$ (the second “approximately” here refers to the fact that MCMC is biased for any finite length of the chain, and the same is true for our method) and then performing Monte Carlo integration $$\phi\approx\frac{1}{m}\sum_{j=1}^{m}\varphi(\theta^{(j)}).$$ Constructing such Markov chains can quickly become infeasible as usually, all data needs to be touched in every iteration. Take for example the standard Metropolis-Hastings transition kernel to simulate from $\pi(\theta)\propto p(\theta|{\cal D})$, where at a current point $\theta^{(j)}$, a proposed new point $\theta’\sim q(\theta|\theta^{(j)})$ is accepted with probability $$\min\left(\frac{\pi(\theta’)}{\pi(\theta^{(j)})}\times\frac{q(\theta^{(j)}|\theta’)}{q(\theta’|\theta^{(j)})},1\right).$$ Evaluating $\pi$ requires to iterate through the whole dataset. A natural question therefore is: is it possible to only use subsets of $\mathcal{D}$?
Existing work. There has been a number of papers that tried to use sub-sampling within the transition kernel of MCMC:
An adaptive sub-sampling approach: Use concentration bounds to decide whether to accept/reject. Quantify error, establish convergence.
Firefly Monte Carlo: Augment the state space of the Markov chain and combine with a lower bound on the likelihood
All these methods have in common that they either introduce bias (in addition to the bias caused by MCMC), have no convergence guarantees, or mix badly. This comes from the fact that it is extremely difficult to modify the Markov transition kernel and maintain its asymptotic correctness.
In our paper, we therefore take a different perspective. If the goal is to solve an estimation problem as the one above, we should not make our life hard trying to simulate. We construct a method that directly estimates posterior expectations — without simulating from the full posterior, and without introducing sub-sampling bias.
The idea is very simple:
Construct a series of partial posterior distributions $\tilde{\pi}_{l}:=p({\theta|\cal D}_{l})\propto p({\cal D}_{l}|\theta)p(\theta)$ from subsets of sizes $$\vert\mathcal{D}_1\vert=a,\vert\mathcal{D}_2\vert=2^{1}a,\vert\mathcal{D}_3\vert=2^{2}a,\dots,\vert\mathcal{D}_L\vert=2^{L-1}a$$ of the data. This gives $$p(\theta)=\tilde{\pi}_{0}\rightarrow\tilde{\pi}_{1}\rightarrow\tilde{\pi}_{2}\rightarrow\dots\rightarrow\tilde{\pi}_{L}=\pi_{N}=p({\theta|\cal D}).$$
Compute posterior expectations $\phi_{t}:=\hat{\mathbb{E}}_{\tilde{\pi}_{t}}\{\varphi(\theta)\}$ for each of the partial posteriors. This can be done for example MCMC, or other inference methods. This gives a sequence of real valued partial posterior expectations — that converges to the true posterior.
Use the debiasing framework, by Glynn & Rhee. This is a way to unbiasedly estimate the limit of a sequence without evaluating all elements. Instead, one randomly truncates the sequence at term $T$ (which should be “early” in some sense, $T$ is a random variable), and then computes $$\phi^*=\sum_{t=1}^T \frac{\phi_{t}-\phi_{t-1}}{\mathbb{P}\left[T\geq t\right]}.$$ This is now an unbiased estimator for the full posterior expectation. The intuition is that one can rewrite any sequence limit as a telescopic sum $$\lim_{t\to\infty} \phi_t=\sum_{t=1}^\infty (\phi_{t}-\phi_{t-1})$$ and then randomly truncate the infinite sum and divide through truncation probabilities to leave the expectation untouched, i.e. $$\mathbb{E}[\phi^*]=\phi,$$where $\phi$ is the sequence limit.
In the paper, we choose the random truncation time as $$\mathbb{P}(T=t)\propto 2^{-\alpha t}.$$ From here, given a certain choice of $\alpha$, it is straight-forward to show the average computational cost of this estimator is $\mathcal{O} (N^{1-\alpha}),$ which is sub-linear in $N$. We also show that variance is finite and can be bounded even when $N\to\infty$. This statement is modulo certain conditions on the $\phi_t$. In addition, the choice of the $\alpha$-parameter of the random truncation time $T$ is crucial for performance. See the paper for details how to set it.
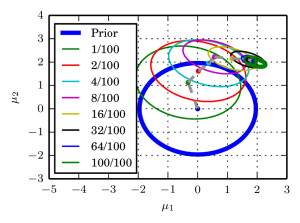
Conentration Gaussian
Debiasing illustration
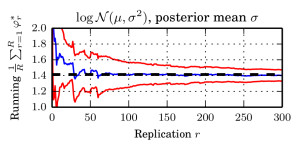
Experimental results are very encouraging. On certain models, we are able to estimate model parameters accurately before plain MCMC even has finished a single iteration. Take for example a log-normal model $$p(\mu,\sigma|{\cal D})\propto\prod_{i=1}^{N}\log{\cal N}(x_{i}|\mu,\sigma^{2})\times\text{flat prior}$$ and functional $$\varphi((\mu,\sigma))=\sigma.$$ We chose the true parameter $\sigma=\sqrt{2}$ and ran our method in $N=2^{26}$ data. The pictures below contain some more details.
Debiasing
Used data in debiasing
Convergence of statistic
Comparison to stochastic variational inference is something we only thought of quite late in the project. As we state in the paper, as mentioned in my talks, and as pointed out in feedback from the community, we cannot do uniformly better than MCMC. Therefore, comparing to full MCMC is tricky — even though there exist trade-offs of data redundancy and model complexity that we can exploit as showed in the above example. Comparing to other “limited data” schemes really showcases the strength (and generality) of our method.
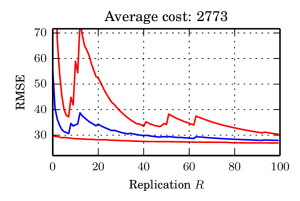
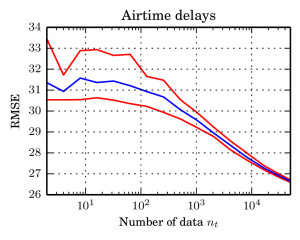
We chose to compare against “Gaussian Processes for Big Data“, which puts together a decade of engineering of variational lower bounds, the inducing features framework for GPs, and stochastic variational inference to solve Gaussian Process regression on roughly a million data points. In contrast, our scheme is very general and not specifically designed for GPs. However, we are able to perform similar to this state of the art method. On predicting airtime delays, we reach a slightly lower RMSE at comparable computing effort. The paper contains details on our GP, which is slightly different (but comparable) to the one used in the GP for Big Data paper. Another neat detail of the GP example is that the likelihood does not factorise, which is in contrast to most other Bayesian sub-sampling schemes.
Debiasing
Convergence of RMSE
GP for Big Data
In summary, we arrive at
Computational costs sub-linear in $N$
No introduced sub-sampling bias (in addition to MCMC, if used)
Finite, and controllable variance
A general scheme that is not limited to MCMC nor to factorising likelihoods
A scheme that trades off redundancy for computational savings
A practical scheme that performs competitive to state-of-the-art methods and that has no problems with transition kernel design.
See the paper for a list of weaknesses and open problems.
In this year’s ICML in Bejing, Arthur Gretton, presented our paper on Kernel Adaptive Metropolis Hastings [link, poster]. His talk slides are based on Dino Sejdinovic ones [link]. Pitty that I did not have travel funding. The Kameleon is furious!
The idea of the paper is quite neat: It is basically doing Kernel-PCA to adapt a random walk Metropolis-Hastings sampler’s proposal based on the Markov chain’s history. Or, more fancy: Performing a random walk on an empirically learned non-linear manifoldinduced by an empirical Gaussian measure in aReproducing Kernel Hilbert Space (RKHS). Sounds scary, but it’s not: the proposal distribution ends up being a Gaussian aligned to the history of the Markov chain.
We consider the problem of sampling from an intractable highly-nonlinear posterior distribution using MCMC. In such cases, the thing to do ™ usually is Hamiltonian Monte Carlo (HMC) (with all its super fancy extensions on Riemannian manifolds etc). The latter really is the only way to sample from complicated densities by using the geometry of the underlying space. However, in order to do so, one needs access to target likelihood and gradient.
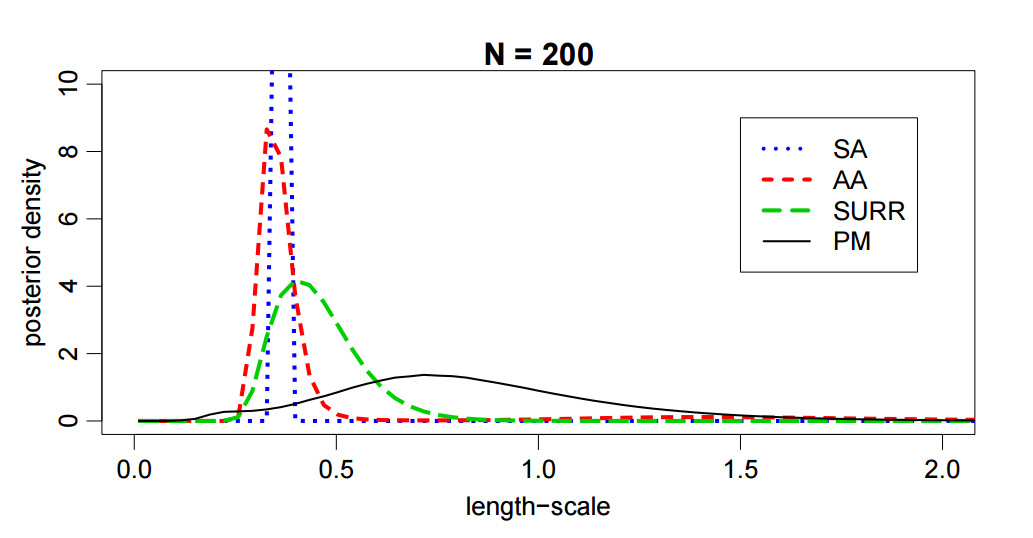
We argue that there exists a class of posterior distributions for that HMC is not available, while the distribution itself is still highly non-linear. You get them as easy as attempting binary classification with a Gaussian Process. Machine Learning doesn’t get more applied. Well, a bit: we sample the posterior distribution over the hyper-parameters using Pseudo-Marginal MCMC. The latter makes both likelihood and gradient intractable and the former in many cases has an interesting shape. See this plot which is the posterior of parameters of an Automatic Relevance Determination Kernel on the UCI Glass dataset. This is not an exotic problem at all, but it has all the properties we are after: non-linearity and higher order information unavailable. We cannot do HMC, so we are left with a random walk, which doesn’t work nicely here due to the non-linear shape.
The idea of our algorithm is to do a random walk in an infinite dimensional space. At least almost.
We run some method to get a rough sketch of the distribution we are after.
We then embed these points into a RKHS; some infinite dimensional mean and covariance operators are going on here, but I will spare you the details here.
In the RKHS, the chain samples are Gaussian, which corresponds to a manifold in the input space, which in some sense aligns with what we have seen of the target density yet.
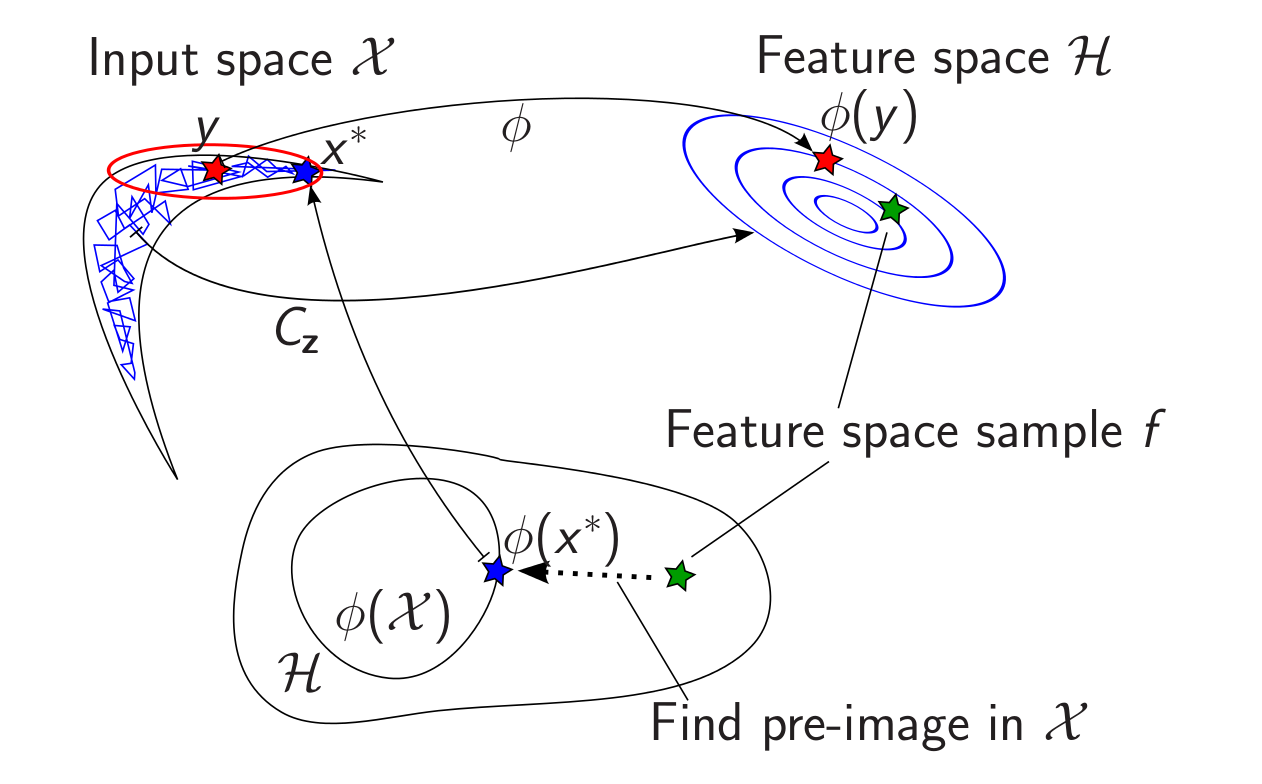
We draw a sample $f$ from that Gaussian – random walk in the RKHS
This sample is in an infinite dimensional space, we need to map it back to the original space, just like in Kernel PCA
It turns out that is hard (nice word for impossible). So let’s just take a gradient step along some cost function that minimises distances in the way we want: \[\argmin_{x\in\mathcal{X}}\left\Vert k\left(\cdot,x\right)-f\right\Vert _{\mathcal{H}}^{2}\]
Cool thing: This happens in input space and gives us a point whose embedding is in some sense close to the RKHS sample.
Wait, everything is Gaussian! Let’s be mathy and integrate the RKHS sample (and the gradient step) out.
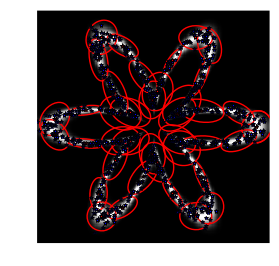
Et voilà, we get a Gaussian proposal distribution in input space\[q_{\mathbf{z}}(\cdot|x_{t})=\mathcal{N}(x_{t},\gamma^{2}I+\nu^{2}M_{\mathbf{z},x_{t}}HM_{\mathbf{z},x_{t}}^{\top}),\]where $\Mz=2\eta\left[\nabla_{x}k(x,z_{1})|_{x=y},\ldots,\nabla_{x}k(x,z_{n})|_{x=y}\right]$ is based on kernel gradients (which are all easy to get). This proposal aligns with the target density. It is clear (to me) that using this for sampling is better than just an isotropic one. Here are some pictures of bananas and flowers.
The paper puts this idea in the form of an adaptive MCMC algorithm, which learns the manifold structure on the fly. One needs to be careful about certain details, but that’s all in the paper. Compared to existing linear adaptive samplers, which adapt to the global covariance structure of the target, our version adapts to the local covariance structure. This can all also be mathematically formalised. For example, for the Gaussian kernel, the above proposal covariance becomes \[\left[\text{cov}[q_{\mathbf{z}(\cdot|y)}]\right]_{ij} = \gamma^{2}\delta_{ij} + \frac{4\nu^{2}}{\sigma^{4}}\sum_{a=1}^{n}\left[k(y,z_{a})\right]^{2}(z_{a,i}-y_{i})(z_{a,j}-y_{j}) +\mathcal{O}(n^{-1}),\] where the previous points $z_a$ influence the covariance, weighted by their similarity $k(y,z_a)$ to current point $y$.
Pretty cool! We also have a few “we beat all competing methods” plots, but I find those retarded and will spare them here – though they are needed for publication 😉
Dino and me have also written a pretty Python implementation (link) of the above, where the GP Pseudo Marginal sampling is done with Shogun’s ability to importance sample marginal likelihoods of non-conjugate GP models (link). Pretty cool!
For a standard Bayesian inference problem with likelihood $\pi(y|\theta) $, prior $\pi(\theta)$, and a proposal $Q$, rather than using the standard M-H ratio $$\frac{\pi(y|\theta^{\text{new}})}{pi(y|\theta)}\times\frac{\pi(\theta^{\text{new}})}{\pi(\theta)}\times \frac{Q(\theta|\theta^{\text{new}})}{Q(\theta^{\text{new}}|\theta)},$$ the likelihood is replaced by an unbiased estimator as
$$\frac{\hat{\pi}(y|\theta^{\text{new}})}{\hat{\pi}(y|\theta)}\times\frac{\pi(\theta^{\text{new}})}{\pi(\theta)}\times \frac{Q(\theta|\theta^{\text{new}})}{Q(\theta^{\text{new}}|\theta)}.$$ Remarkably the resulting Markov chain converges to the same posterior distribution as the exact algorithm. The approach was later formalised and popularised in [2].
In our project, we exploited this idea to perform inference over models whose likelihood functions are intractable. Example of such intractable likelihoods are for example Ising models or, even simpler, very large Gaussian models. Both of those models’ normalising constants are very hard to compute. We came up with a way of producing unbiased estimators for the likelihoods, which are based on writing likelihoods as an infinite sum, and then truncating it stochastically.
Producing unbiased estimators for the Pseudo-Marginal approach is a very challenging task. Estimates have to be strictly positive. This can be achieved via pulling out the sign of the estimates in the final Monte-Carlo integral estimate and add a correction term (which increases the variance of the estimator). This problem is studied under the term Sign problem. The next step is to write the likelihood function as an infinite sum. In our paper, we do this for a geometrically titled correction of a biased estimator obtained by an approximation such as importance sampling estates, upper bounds, or deterministic approximations, and for likelihoods based on the exponential function.
I in particular worked on the exponential function estimate. We took a very nice example from spatial statistics: a worldwide grid of ozone measurements from a satellite that consists of a about 173,405 measurements. We fitted a simple Gaussian model whose covariance matrices are massive (and sparse). In such models of the form $$ \log \mathcal{N}_x(\mu,\Sigma))=-\log(\det(\Sigma)) – (\mu-x)^T \Sigma^{-1}(\mu-x) + C, $$ the normalising constant involves a log-determinant of such a large matrix. This is impossible using classical methods such as Cholesky factorisation $$\Sigma=LL^T \Rightarrow \log(\det(\Sigma))=2\sum_i\log(L_{ii}),$$ due to memory shortcomings: It is not possible to store the Cholesky factor $L$ since it is not in general sparse. We therefore constructed an unbiased estimator using a very neat method based on graph colourings and Krylov methods from [3].
This unbiased estimator of the log-likelihood is then turned into a (positive) unbiased estimator of the likelihood itself via writing the exponential function as an infinite series $$\exp(\log(\det(\Sigma)))=1+\sum_{i=1}^\infty \frac{\log(\det(\Sigma))^i}{i!}. $$
We then construct an unbiased estimator of this series by playing Russian Roulette: We evaluate the terms in the series and plug in a different estimator for $\log(\det(\Sigma))$ for every $i$; once those values are small, we start flipping a coin every whether we continue the series or not. If we do continue, we add some weights that ensure unbiasedness. We also ensure that it is less likely to continue in every iteration so that the procedure eventually stops. This basic idea (borrowed from Physics papers from some 20 years ago) and some technical details and computational tricks then give an unbiased estimator of the likelihood of the log-determinant of our Gaussian model and can therefore be plugged into Pseudo-Marginal M-H. This allows to perform Bayesian inference over models of sizes where it has been impossible before.
More details can be found on our project page (link, see ozone link), and in our paper draft on arXiv (link). One of my this year’s Google summer of Code projects for the Shogun Machine-Learning toolbox is about producing a sophisticated implementation of log-determinant estimators (link). Pretty exciting!
[1]: Beaumont, M. A. (2003). Estimation of population growth or decline in genetically monitored populations. Genetics 164 1139–1160.
[2]: Andrieu, C., & Roberts, G. O. (2009). The pseudo-marginal approach for efficient Monte Carlo computations. The Annals of Statistics, 37(2), 697–725.
[3]: Aune, E., Simpson, D., & Eidsvik, J. (2012). Parameter Estimation in High Dimensional Gaussian Distributions.













 We argue that there exists a class of posterior distributions for that HMC is not available, while the distribution itself is still highly non-linear. You get them as easy as attempting binary classification with a
We argue that there exists a class of posterior distributions for that HMC is not available, while the distribution itself is still highly non-linear. You get them as easy as attempting binary classification with a