If six months ago I was told that I would climb El Capitan within the year I would not have believed it
First sentence of a blog post I read a few months ago. Had I been told I would write the same myself soon, I would not have believed it either.
The last year and a half has certainly been intense. Roughly: I stopped working, converted a van, drove to Spain, and climbed loads: adventure trad in Costa Blanca, sport in El Chorro, slabs and off-widths in La Pedriza, granite corner cracks in Galayos and Torozo, monstrous alpine classics in the Pyrenees, amazing limestone canalizos in the Picos de Europa.
And then finally Yosemite, confronting Lurking Fear VI 5.7 C2+ on the Captain. Stating this as a goal always felt somewhat ridiculous, almost like a joke. But in hindsight, all we did was to start climbing, and follow Andy Kirkpatrick’s advice: When things get hard don’t come down.
It is hard to summarise all these experiences in words — many firsts, many achievements, many failures and many I-will-never-climb-again-moments — so I will not. Below are some pictures.
Building the van
Costa Blanca and El Chorro in southern Spain
La Pedriza <3, Galayos, and Torozo in central Spain
More score matching for estimating gradients using the infinite dimensional kernel exponential family (e.g. for gradient-free HMC)! This paper tackles one of the most limiting practical characteristics of using the kernel infinite dimensional exponential family model in practice: the smoothness assumptions that come with the standard “swiss-army-knife” Gaussian kernel. These smoothness assumptions are blessing and curse at the same time: they allow for strong statistical guarantees, yet they can quite drastically restrict the expressiveness of the model.
To see this, consider a log-density model of the form (the “lite” estimator from our HMC paper) $$\log p(x) = \sum_{i=1}^n\alpha_ik(x,z_i)$$for “inducing points” $z_i$ (the points that “span” the model, could be e.g. the input data) and the Gaussian kernel $$k(x,y)=\exp\left(-\Vert x-y\Vert^2/\sigma\right)$$Intuitively, this means that the log-density is simply a set of layered Gaussian bumps — (infinitely) smooth, with equal degrees of variation everywhere. As the paper puts it
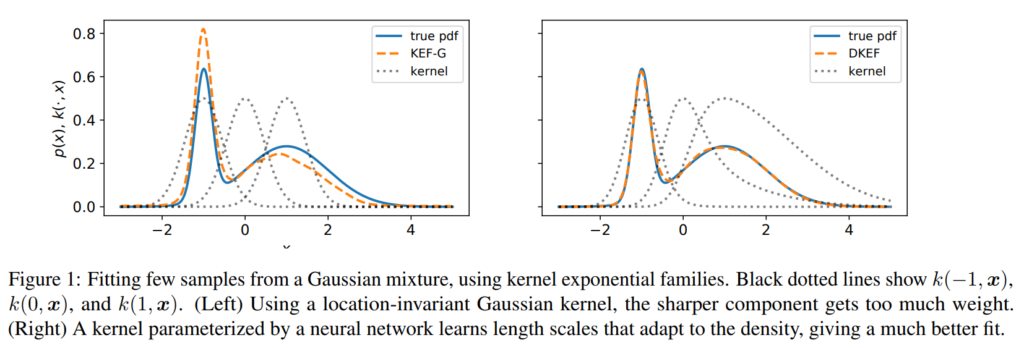
These kernels are typically spatially invariant, corresponding to a uniform smoothness assumption across the domain. Although such kernels are sufficient for consistency in the infinite-sample limit, the induced models can fail in practice on finite datasets, especially if the data takes differently-scaled shapes in different parts of the space. Figure 1 (left) illustrates this problem when fitting a simple mixture of Gaussians. Here there are two “correct” bandwidths, one for the broad mode and one for the narrow mode. A translation-invariant kernel must pick a single one, e.g. an average between the two, and any choice will yield a poor fit on at least part of the density
How can we learn a kernel that locally adapts to the density? Deep neural networks! We construct a non-stationary (i.e. location dependent) kernel using a deep network $\phi(x)$ on top a Gaussian kernel, i.e. $$k(x,y) = \exp\left(-\Vert \phi(x)-\phi(y)\Vert^2 / \sigma\right)$$ The network $\phi(x)$ is fully connected with softplus nonlinearity, i.e. $$\log(1+e^x)$$Softplus gives us some nice properties such as well-defined loss functions and a normalizable density model (See Proposition 2 in the paper for details).
However, we need to learn the parameters of the network. While kernel methods typically have nice closed-form solution with guarantees (and so does the original kernel exponential family model, see my post). Optimizing the parameters of ϕ(x)ϕ(x)ϕ(x) obviously makes things way more complicated: Whereas we could use a simple grid-search or black-box optimizer for a single kernel parameter, this approach here fails due to the number of parameters in ϕ(x)ϕ(x)12∫p0(x)∥∇xlogp(x)−∇xlogp0(x)∥2dx.
Could we use naive gradient descent? Doing so on our score-matching objective12∫p0(x)∥∇xlogp(x)−∇xlogp0(x)∥2dxwith logp(x)=∑ni=1αik(zi,x) and k(x,y)=exp(−∥x−y∥2/σ) will always overfit to the training data as the score (gradient error loss) can be made arbitrarily good by moving zi towards a data point and making σ go to zero. Stochastic gradient descent (the swiss-army-knife of deep learning) on the score matching objective might help, but would indeed produce very unstable updates.
Instead, we employed a two-stage training procedure that is conceptually motivated by cross-validation: we first do a closed-form update for the kernel model coefficients αiαiαi on one half of the dataset, then we perform a gradient step on the parameters of the deep kernel on the other half. We make use of auto-diff — extremely helpful here as we need to propagate gradients through a quadratic-form-style score matching loss, the closed-form kernel solution, and the network. This seems to work quite well in practice (the usual deep trickery to make it work applies). Take away: By using a two-stage procedure, where each gradient step involves a closed form (linear solve) solutions for the kernel coefficients αiαi we can fit this model reliably. See Algorithm 1 in the paper for more nitty-gritty details.
A cool extension of the paper would be to get rid of the sub-sampling/partitioning of the data and instead auto-diff through the leave-one-out error, which is closed form for these type of kernel models, see e.g. Wittawat’s blog post.
We experimentally compared the deep kernel exponential family to a number of other approaches based on likelihoods, normalizing flows, etc, and the results are quite positive, see the paper!
Naturally, as I have worked on using these gradients in HMC where the exact gradients are not available, I am very interested to see whether and how useful such a more expressive density model is. The case that comes to mind (and in fact motivated one of the experiments in the this paper) is the Funnel distribution (e.g. Neal 2003, picture by Stan), e.g.$$p(y,x) = \mathsf{normal}(y|0,3) * \prod_{n=1}^9 \mathsf{normal}(x_n|0,\exp(y/2)).$$
The mighty Funnel
This density historically was used as a benchmark for MCMC algorithms. Among others, HMC with second order gradients (Girolami 2011) perform much better due to their ability to adapt their step-sizes to the local scaling of the density — something that our new deep kernel exponential family is able to model. So I wonder: are there cases where such funnel-like densities arise in the context of say ABC or otherwise intractable gradient models? For those cases, an adaptive HMC sampler with the deep network kernel could improve things quite a bit.
We, the community around the shogun.ml [1] open-source machine learning library, are looking for a developer for a paid 6 month pilot project (October 18 – March 19) on improving meta-learning capabilities (openml, coreml). The ideal candidate is a highly motivated MSc/PhD/postdoc with the desire to get involved in the open-source movement, who
is based on London
is able to start working in October
is flexible enough to spend full-time or at least 50% on the project
has a background in designing software in C++ (gcc, valgrind, C++11, etc)
(optional) has knowledge of openml [2] and coreml [3]
(optional) has experience with build management and dev-ops tools (git, cmake, travis, buildbot, linux, docker, etc)
(optional) has experience in computational sciences (ml, stats, etc)
(optional) has contributed to open-source before
The project is funded by with the Alan Turing institute, and at least part of the work will be located there. You will be supervised by the Shogun core development team, partly in person and partly remotely. This is a great opportunity to get involved in one of the oldest ML libraries out there, getting your hands dirty on a huge code-base, and tipping into the open-source community.
The project is currently in planning stage. After a successful pilot, there is the option for an extension. If you are interested, please get in touch via the developers, the mailing list, or even better, read how to get involved [4] and send us a pull-request for an entrance task [5] on github. See our website for contact details.
Shogun is a library aiming to offer unified and efficient machine learning methods. Its core is written in C++ and it interfaces to a large number of modern computing languages. The Shogun community is vibrant, diverse, and international. Shogun is a fiscally sponsored project of NumFOCUS, a nonprofit dedicated to supporting the open source scientific computing community.
We covered the implementation basics of two-sample testing, independence testing, and goodness-of-fit testing, with examples including testing the quality of GAN samples, detecting dependence across translated documents, and more. I even managed to sneak Shogun into the practical 😉 Good fun overall!
I got mildly involved in a cool project with the ETHZ group, lead by Vincent Fortuin and Matthias Hüser, along with Francesco Locatello, myself, and Gunnar Rätsch. The work is about building a variational autoencoder with a discrete (and thus interpretable) latent space that admits topological neighbourhood structure through using a self organising map. To represent latent dynamics (the lab is interested in time series modelling), there also is a built-in Markov transition model. We just put a version on arXiv.
















 says it all: \"nasty chimney\"")






















")




.")









































 Maybe one day…
Maybe one day…

